理想汽車在2024智能駕駛夏季發布會宣布將於7月內向全量理想AD Max用戶推送“全國都能开”的無圖NOA,並將於7月內推送全自動AES(自動緊急轉向)和全方位低速AEB(自動緊急制動)。
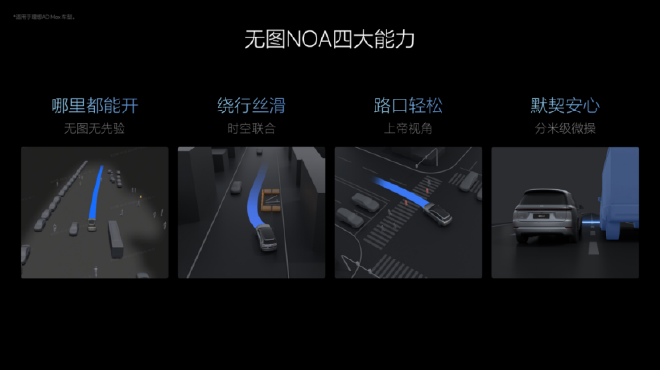
無圖NOA不再依賴高精地圖或先驗信息,在全國範圍內的導航覆蓋區域均可使用,並借助時空聯合規劃能力帶來更絲滑的繞行體驗。無圖NOA也具備超遠視距導航選路能力,在復雜路口依然可以順暢通行。
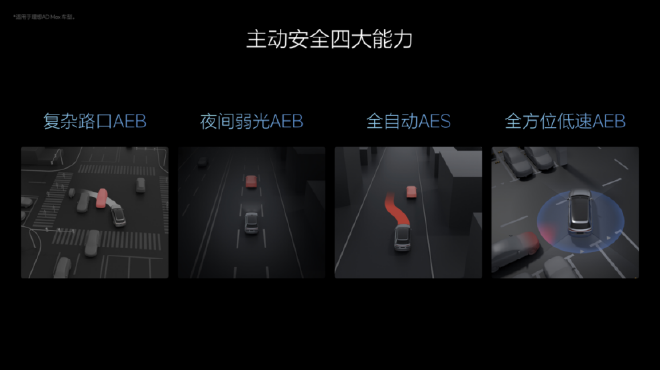
無圖NOA充分考慮用戶心理安全邊界,用分米級微操帶來默契安心的智駕體驗。此外,即將推送的AES功能可以實現不依賴人輔助扭力的全自動觸發,規避更多高危事故風險。全方位低速AEB則再次拓展主動安全風險場景,有效減少低速挪車場景的高頻剮蹭事故發生。
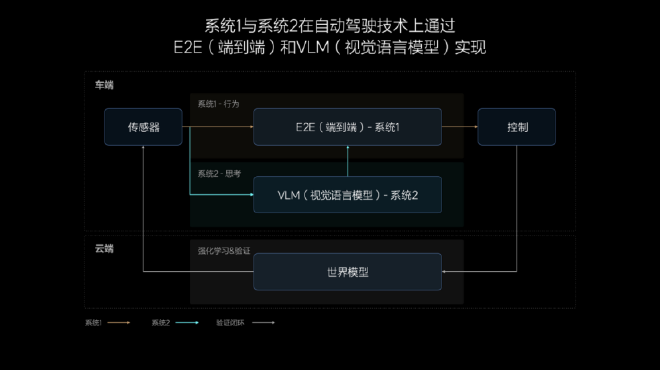
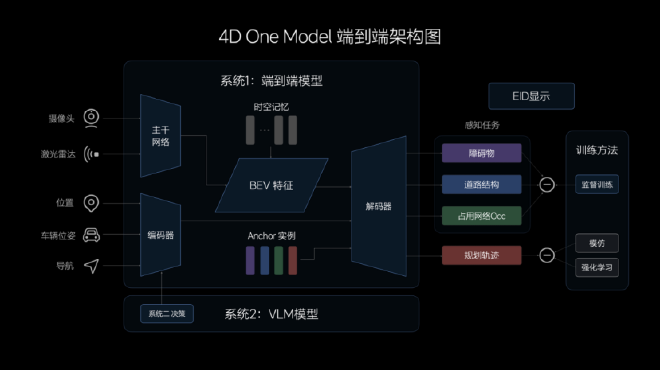
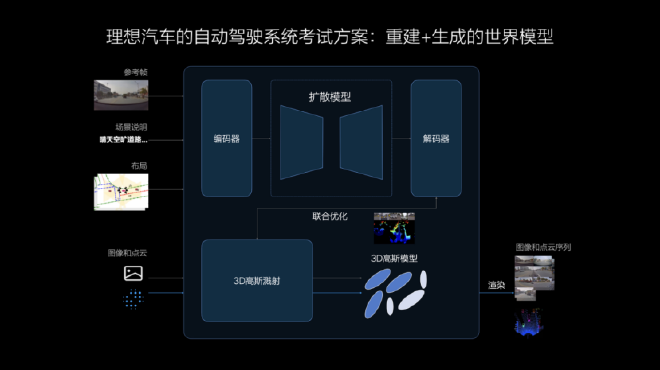
新架構由端到端模型、VLM視覺語言模型和世界模型共同構成。端到端模型用於處理常規的駕駛行爲,從傳感器輸入到行駛軌跡輸出只經過一個模型,信息傳遞、推理計算和模型迭代更高效,駕駛行爲更擬人。
VLM視覺語言模型具備強大的邏輯思考能力,可以理解復雜路況、導航地圖和交通規則,應對高難度的未知場景。同時,自動駕駛系統將在基於世界模型構建的虛擬環境中進行能力學習和測試。
將於7月內推送的無圖NOA帶來四項能力升級,首先擺脫了對先驗信息的依賴,用戶在全國範圍內有導航覆蓋的城市範圍內均可使用NOA,甚至可以在更特殊的胡同窄路和鄉村小路开啓功能。

其次,基於高效的時空聯合規劃能力,車輛對道路障礙物的避讓和繞行更加絲滑。時空聯合規劃實現了橫縱向空間的同步規劃,並通過持續預測自車與他車的空間交互關系,規劃未來時間窗口內的所有可行駛軌跡。
在復雜的城市路口,無圖NOA的選路能力也得到顯著提升。無圖NOA採用BEV視覺模型融合導航匹配算法,實時感知變化的路沿、路面箭頭標識和路口特徵,並將車道結構和導航特徵充分融合,有效解決了復雜路口難以結構化的問題。
通過激光雷達與視覺前融合的佔用網絡,車輛可以識別更大範圍內的不規則障礙物,感知精度也更高,從而對其他交通參與者的行爲實現更早、更准確的預判。
標題:理想汽車將向AD Max用戶推送最新NOA
地址:https://www.utechfun.com/post/393881.html