主動安全系統已是新車款的標準配備,舉凡自動跟車、車道偏移警示及主動煞車等功能,都能大幅提升行車安全並減輕駕駛的精神負擔。但這些系統仍不夠快、也不夠可靠。將來如果要實現無人駕駛車,就需大幅提升它們效能。
最近,蘇黎世大學(University of Zurich)資訊學系的丹尼爾·蓋裏格(Daniel Gehrig)博士和達維德·斯卡拉穆扎(Davide Scaramuzza)教授運用「生物啟發事件相機」(Bio-inspired Event Camera)與人工智慧,開發出一種比當前系統更快速偵測汽車周圍障礙且使用更少算力的系統。這項研究成果已在近期發表於權威的《自然》(Nature)雜誌。
現行用於汽車輔助駕駛的攝影鏡頭,每秒約捕捉 30 到 50 幀圖像,再以先訓練好的神經網路模型來識別影像中物體,如行人、自行車或其他汽車等。格裏格博士說:「但是,如果在兩幀圖像之間的 20 至 30 毫秒內發生了緊急狀況,相機系統就無法及時發現障礙物。解決方案之一,是提高捕捉影像的速率,但這將需要處理更多數據而增高系統算力的需求。」
生物啟發事件相機的運作原理則完全不同。它不以固定速率輸出完整影像,而僅輸出局部像素亮度變化的資訊,稱為事件資訊。當變化強度超過預設值,相機會以「微秒」(千分之一毫秒)級的解析度為事件資訊標記時間戳記。 這種機制是事件相機名稱的由來。
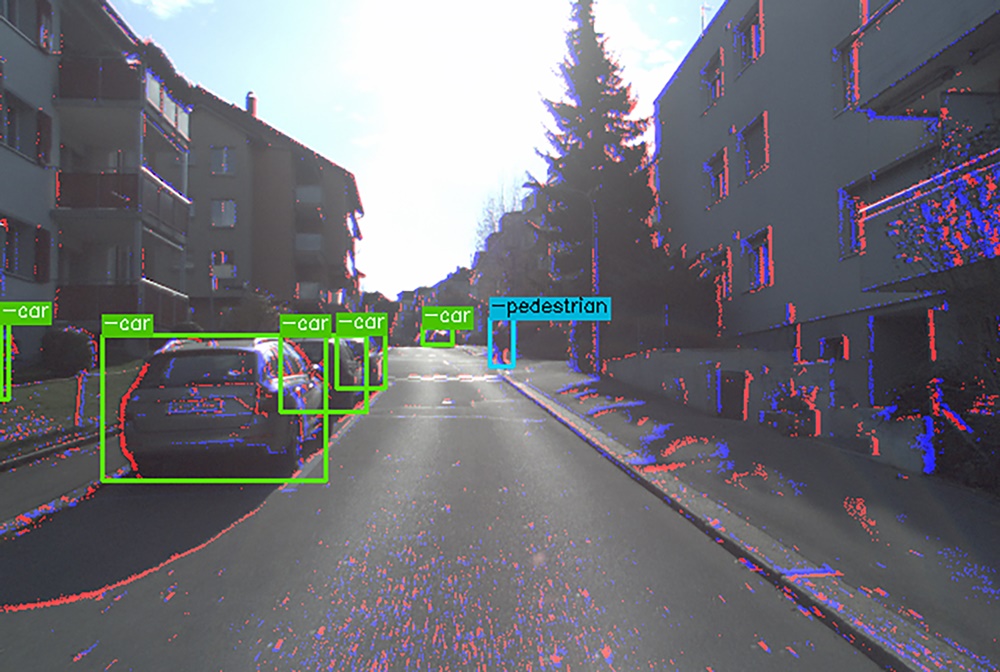
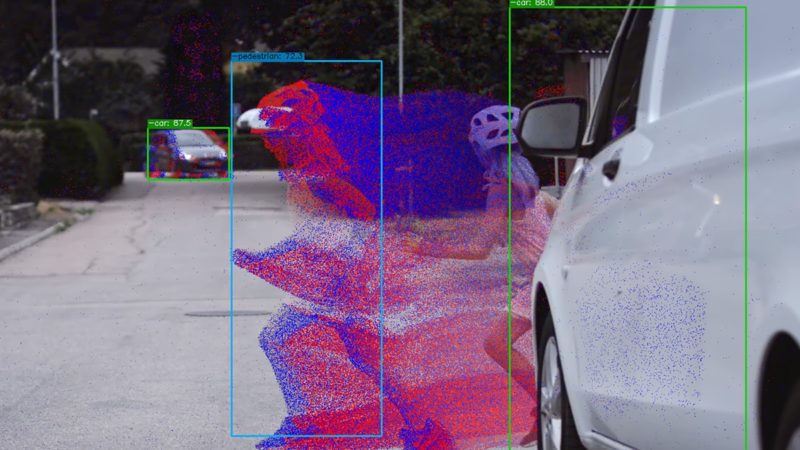
▲ 影像顯示來自彩色相機的顏色資訊和來自事件相機的事件(藍色和紅色點);邊界框顯示了演算法對汽車的偵測。
斯卡拉穆扎教授說:「如此一來,事件相機就(幾乎)沒有時間差,它能更快速偵測出障礙物。因為它是模仿人眼感知圖像的方式運作,因此也被稱為神經形態相機。」但它的缺點是可能會錯過移動緩慢的物體,而且它提供的資訊不適合用於訓練人工智慧演算法。
本次研究則提出結合兩種相機優點的方案:包括一個每秒 20 張影像的標準相機,圖像由神經網路人工智慧系統識別汽車或行人;事件相機的數據則由另一種人工智慧系統(非同步圖像神經網絡)分析隨時間變化的 3D 數據。兩者相輔相成的結果,新系統的效能就像是使用每秒能拍攝 5,000 張影像的相機一樣快速地偵測物體。
與目前最高階的偵測系統一較高下後,研究團隊發現他們的系統檢測速度足足加速了 100 倍,數據傳輸量以及計算量也較小。最重要的是,新系統可以有效地偵測出標準相機兩張連續影像間突然出現的汽車和行人,為駕駛和路上行人提供升級的安全保障。尤其在高速行駛時,新系統的表現更顯突出。
研究人員表示,若進一步將相機與光達感測器(LiDAR)整合在一起,偵測路況的能力將變得更加強大。 斯卡拉穆扎教授表示:「這類混合系統對於自駕的安全性至關重要,而且不會導致數據和計算能力需求大幅增長。」
(圖片來源:)

標題:蘇黎世大學發展更快速偵測道路障礙的駕駛輔助系統
地址:https://www.utechfun.com/post/384583.html