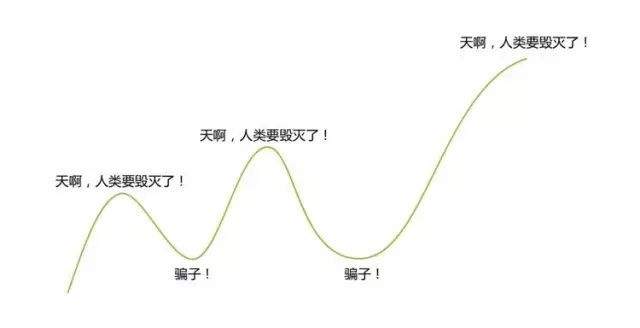
李开復曾提到過一個AI界流傳的“騙子又來了曲线”。 人會不斷給機器進行“是否具有人類智能”的鑑定,而這個過程,總是從被人工智能在某些領域的驚豔表現震撼,到逐漸認識到當時的人工智能還有各種局限,以至於產生巨大心理落差。
近來,人形具身智能機器人在WAIC世界人工智能大會上密集亮相,我們在現場所感受到的就是“人類要毀滅了”與“騙子又來了”,兩種聲音同時存在的復雜現象。
具體來說,認爲“人類要毀滅了”,大多是不明覺厲的普通觀衆,而冷靜甚至不看好人形機器人的多爲AI、機器人領域的業內人士。
比如獵豹移動董事長兼CEO、獵戶星空董事長傅盛就表示,“機器人在今年的展廳裏是爆發了,但在日常生活當中,我們並沒有看到它在哪個地方被大規模用起來。機器人行業的產業爆發還遠遠沒有到來……對人形機器人的不看好一定會被時間證明”。
這兩種心態,究竟哪一種才代表人形機器人產業的真相呢?
其實並沒有什么真相。不同的心態,是由不同的判定標准而產生的。大衆、從業者和技術專家,都有一張“我心中的人形機器人”打分表,評價尺度各不相同。
而關於人形機器人的期待,在人形、大模型、具身三個標准上,大衆的預期、媒體的宣傳、產業的實際進展等都有比較大的分野。這構成了當前,人形機器人的理想與現實。
“變形金剛”的理想與現實
“他們怎么不動啊,不表演有什么必要插電源?”
“插電亮着好看。”
本屆WAIC最吸睛的,就是中央展廳的“十八金剛”了。18個人形機器人同台而立,幾乎每個參觀者都聚集在展台前打卡拍照,在展台旁邊,我聽到了這段對話。
大衆理想中,人形機器人就是變形金剛、機甲战士那樣,走路又穩又快,行動靈活,隨意移動,無論是工廠上班、護理老人還是投遞包裹,都手拿把掐。

但產業現實中,WAIC上的人形機器人大多數時間都待在展台上,在特定時間表演一些拿蘋果、端杯子之類的手部動作,特斯拉的機器人甚至始終待在玻璃展櫃中一動不動。和全場溜達的機器狗相比,人形機器人顯得“內向”很多。
由此可見,到底需不需要“雙足行走”,成了目前公衆和從業者對人形機器人,最大的認知差異。
總的來說,雙足人形機器人是“機器人的皇冠”,是終極方向,才是大衆期待的“變形金剛”。
但至少要走過三步:雙足行走、執行復雜任務、規模商用。
而目前,僅僅是第一步“雙足行走”,在技術和商業上都並不是最佳狀態。
一方面,穩定的行走,需要系統擁有極高的魯棒性。
機器人在面臨各種異常情況和輸入時,仍然能快速通過運動控制模塊調整姿態,保持正常運行。
要提升系統的魯棒性(或者說穩健性),依賴於機器人與人類、物理世界的真實交互,來積累高質量數據。如果遇到訓練環境中沒有出現過的問題,機器人就可能出現異常或“死機”,系統研發效率是比較低的。
另外,商業上“雙足行走”也並不是剛需。
比如特斯拉、Figure等都宣布要讓人形機器人“進廠打工”,從事電池分揀等工作。但實際上,制造環節80%以上生產作業動作,其實很少用到下肢,用到軀幹,主要是靠手來完成的。這種上肢爲主的簡單系統,可以減少控制難度,降低投入成本,並且更容易規模化量產,因爲只需要將最重要的一部分功能(手部)進行復制。一旦加上四肢、軀幹,控制難度、續航、成本都會大幅提升。
所以,目前能夠規模化應用的機器人形態,都是以機器狗、機械手等單一、極簡形態。滿足大衆期待的“變形金剛”,要在邁過很多步之後,才能帶來極大產業效應。
幾年之內,我們應該都會更常在展台和展櫃中看見人形機器人,而非零距離互動。
大模型的理想與現實
“現場機器人好多,我都感覺主題有點跑偏了”,一位計算領域的從業者對我說道。
智能機器人在人工智能大會上遍地开花,根本邏輯是——大模型爲具身智能开啓了新的解決方案的大門。
傳統的人工智能系統,受限於缺乏先驗知識,理解力與泛化能力捉襟見肘,導致機器人難以像人類一樣擁有基本的常識判斷能力,這嚴重制約了高級別具身智能的發展。機器人執行任務時,往往需要人類工程師將復雜指令拆解爲一系列簡化的、程序化的步驟,再由機器人(如機械臂)逐一執行。顯然,這種“智能水平”並不算很高,還需要人來做大量的代碼和开發工作。
理想中,大模型會爲人形機器人的“智能水平”,帶來顛覆性的變革。
大模型相較於傳統機器學習方法,擁有更加強大的泛化能力,可以爲人形機器人的大量任務,比如復雜任務解析、流暢連續對話、零樣本推理等,提供全新的解決方案。
舉個例子,告訴人形機器人“我餓了”,它會自動分析這句話背後的需求,並拆解爲可執行的具體動作,通過觀察物理環境,從冰箱裏拿出一個蘋果給你喫,不需要人來拆分指令。
但現實中,大模型給人形機器人帶來的變革,仍然停留在初級的“自然語言交互”。
目前絕大多數人形機器人,更多是擁有了類ChatGPT的“嘴”。這種結合,雖然能提供更自然生動的交互體驗,但只是將現有的語音交互進行了升級,並非“端到端”任務執行能力的顛覆式突破。

無需人工參與的高度自動化,爲什么有了大模型也沒能快速實現呢?
究其根本,機器人是一個非常復雜的學科,涉及精密機械、自動控制、電氣電子、計算科學,最後呈現出一個非常復雜智能機電一體化系統。
從有監督機器學習到大語言模型,是計算領域的技術突破,可以在交互、規劃、決策等環節發揮作用。然而,從機械化到高度自動化,人形機器人的再進化,還需要感知技術、驅動與傳動技術、萬兆網絡等的技術和資源支持。
國產機器人崛起的理想與現實
“美國公司負責忽悠概念,中國公司負責讓機器人落地、商用,把價格打下來,讓人人實現機器人自由。”
此次WAIC大會,國產人形機器人的表現確實要比海外公司亮眼很多。無論是特斯拉、谷歌,在機器人的展示上都堪稱乏味。而國產人形機器人不僅批量化、大規模出現,而且展現出了在很多具體場景中的商用能力,比如做飯機器人、電信機器人、家政陪伴機器人等。
那么,這是不是意味着國產人形機器人廠商會很快崛起呢?
我們當然希望這一天能盡快實現,但目前來看現實還有不確定性。
數據層面,特斯拉、谷歌等科技巨頭,在自動駕駛領域有多年積累,可以將足夠多的空間數據喂給模型,解決人形機器人在復雜空間中的學習問題,從而更好地進行迭代學習。而在WAIC現場,我們看到的大多數國產人形機器人廠商的業務面還比較孤立,百度、商湯等數據積累面廣的AI公司,則更多聚焦在汽車形態的智能機器人。這意味着,解決人形機器人的數據問題,還有賴於產生生態化、產業化、多方共建的解決方案。
算法層面,類GPT-4o能力的國產多模態大模型還比較稀缺,這使得人形機器人通過視覺、音頻等多維度數據來識別地圖和復雜場景的能力,大大受到限制。目前,海外產學界已經在多模態大模型上系統性發力。比如OpenAI基於GPT-4o爲Figure 01構建了一個具身智能AI模型,谷歌推出了多模態具身視覺語言模型PaLM-E。加州大學伯克利分校推出了LM Nav,來實現硬件本體、運動小腦、決策大腦三部分逐漸融合。目前來看,國產基礎大模型還有一段路要追趕。

發展國產人形機器人產業,是一條難而正確的路。在這條路上,我們既不希望“騙子又來了”,也不希望“人類被毀滅了”。歷史告訴我們,技術發展過程中一定會經歷上升、頂峰、陷入低谷、攀升、穩定5個階段。
人形機器人產業要避免跌入低谷,持續發展,就要在理想與現實中,不斷校正自己的坐標,在每一個發展階段兌現實用價值。
原文標題 : 人形機器人的理想與現實
標題:人形機器人的理想與現實
地址:https://www.utechfun.com/post/396063.html