【EV視界試駕】說到自動輔助駕駛,以目前的門派來看其只有其二。一是以激光雷達、毫米波雷達、視覺攝像頭等感知設備組成的融合派,另一個,是單單依靠視覺攝像頭的純視覺派。而今天我們所要提到的這款新車,就是採用了後者。
這裏,您是否會認爲我們說的是不是特斯拉?答案是“不”。今天的主角是一家大家熟知的自主造車企業,一句“人民需要什么就造什么”的口號震驚四座,沒錯它就是五菱汽車,而今天我們所要體驗的,就是它即將上市的寶駿雲朵(配置|詢價)靈犀版。

這款車型與之前上市車型最大的不同,就是其在智駕方面做了全面地強化。新車搭載了由寶駿與大疆車載聯手打造的“靈犀智駕2.0”,據說是實現行業首個可覆蓋全國的高速智能領航輔助,並將支持可跨層記憶泊車、循跡倒車等智駕功能。而今天,我們將針對新車的智駕功能,做一個全面的體驗。(之前靜態體驗:你很能“裝”!靜態體驗寶駿雲朵)
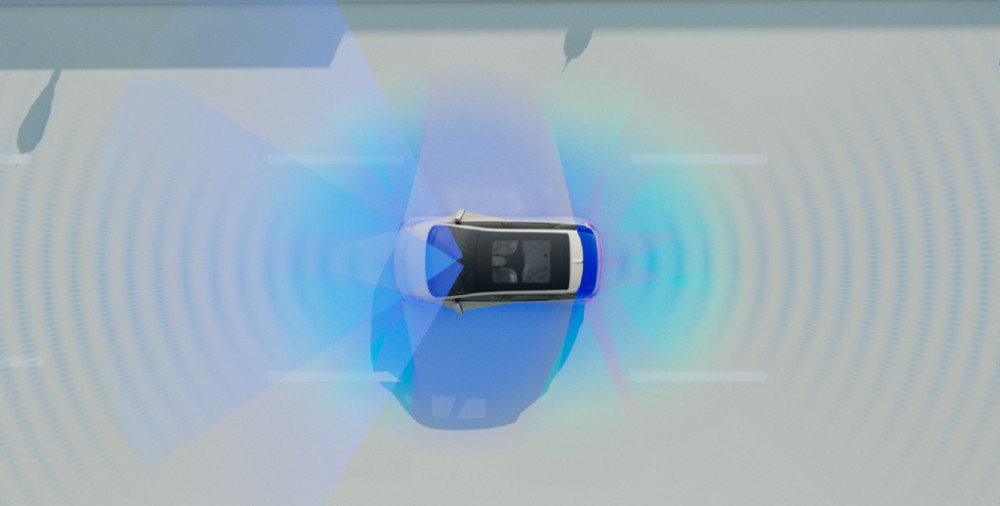
我們先來看一下這款車的感知設備,寶駿雲朵靈犀版整車的智駕感知設備包括車頭一組800萬像素慣導雙目攝像頭、車尾一個300萬像素後駕駛輔助單目攝像頭 、4個300萬像素環視攝像頭、一個車頭毫米波雷達和車身前後12個超聲波雷達。

但這裏要重點提一下的是,雖然包含了毫米波雷達,但是它最大的作用是用來識別動態的目標識別,對於整個“靈犀智駕2.0”的算法架構上,其權重只佔一小點,而或許未來通過視覺感知算法的迭代升級,毫米波雷達終將被取代,這只是時間問題。
回歸正題,我們接着來看這套智駕系統。
寶駿雲朵靈犀版所配備的這一套800萬像素慣導雙目攝像頭,最大的初衷就是用來平替激光雷達。我們知道,目前一些高端豪華車企所配備的“全家桶”級別的感知設備中,屬激光雷達的身價最高,雖然能夠爲車輛帶來長遠的感知能力,但是這也導致了整個智駕方案成本的提升。
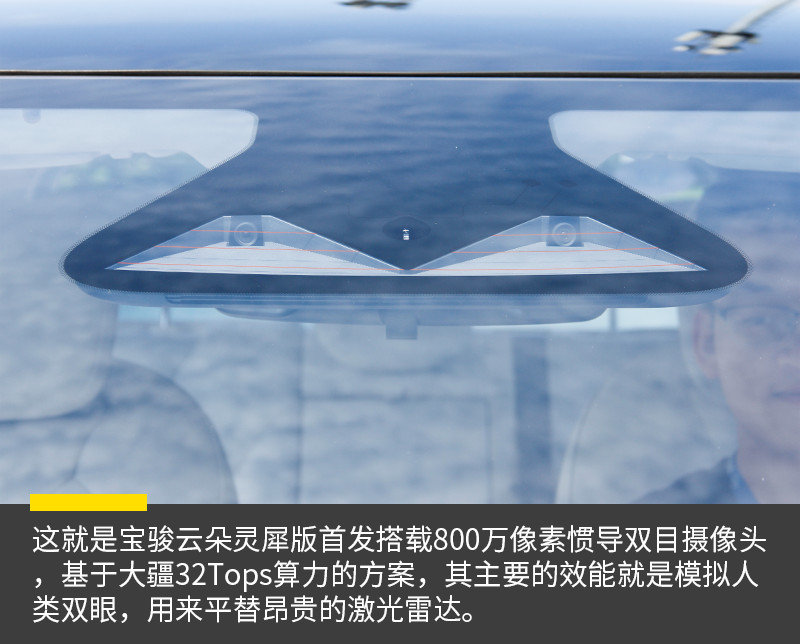
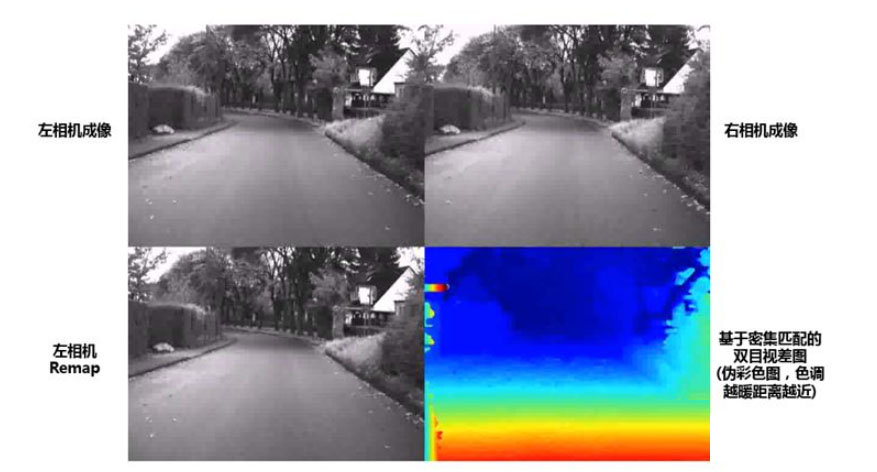
根據廠家介紹,寶駿的這一套800萬像素慣導雙目攝像頭,通過與人眼相似的立體視覺原理獲得距離信息形成強泛化、高精度的點雲,實現對環境的准確感知,不僅可以完成更加可靠、更加魯棒性的任意類型障礙物檢測和避讓,還能應對混亂車道线、大曲率彎道和近距離加塞等復雜路況,並且在弱依賴數據積累的情況下能實現較好的場景泛化。

也就是說這組雙目攝像頭能夠模擬人類的雙眼,通過物理產生的位置偏差來實現對於立體輪廓的識別,如此既能達到激光雷達的效能,又可以減少高昂的成本,可謂一舉兩得。
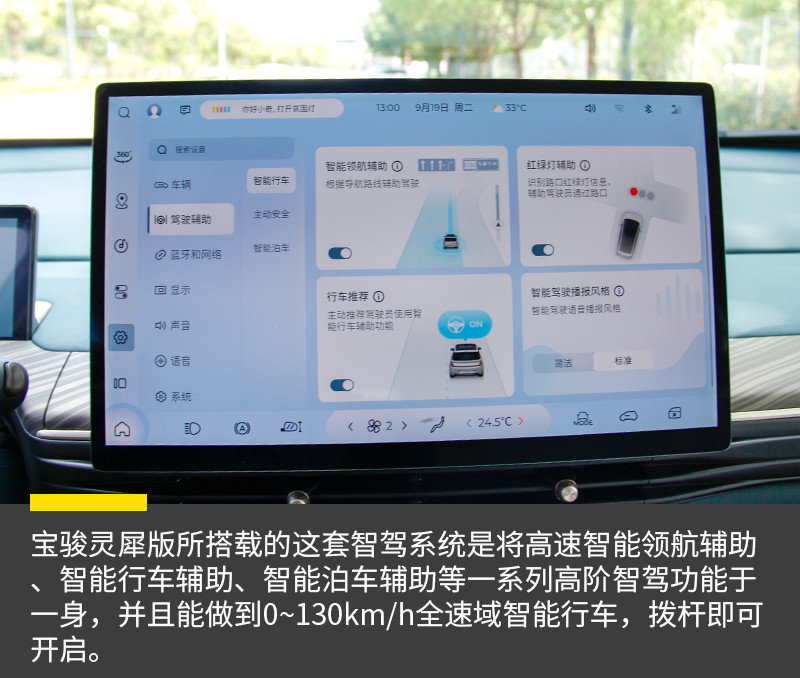
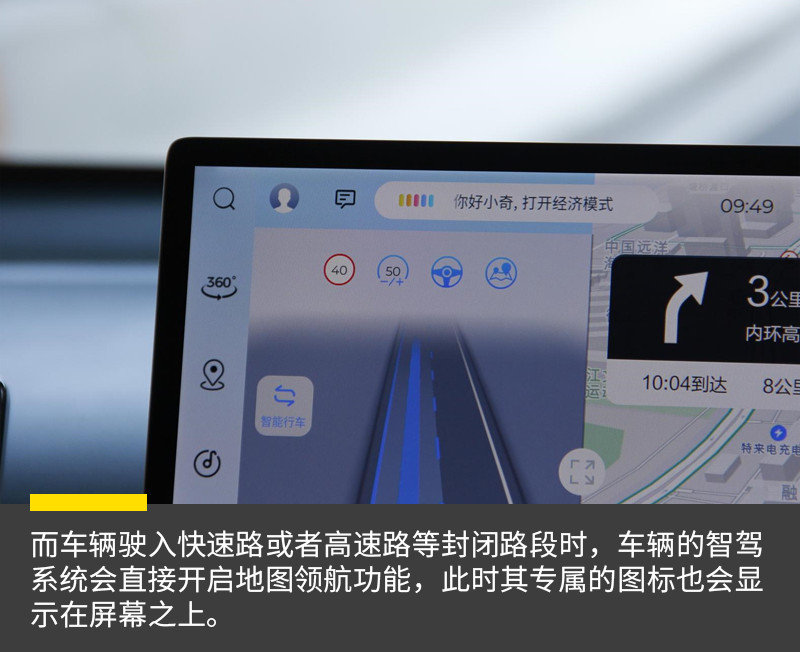
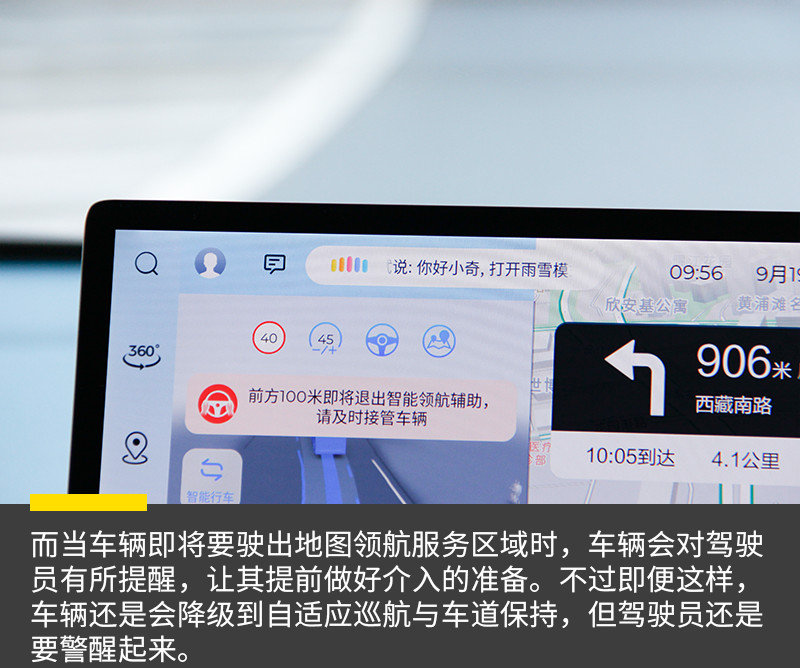
另外,靈犀智駕2.0系統最大的特點就是其不依賴高精地圖的屬性,因此可以可覆蓋全國的“地圖”高速智能領航輔助。
而能做到這一點,無不與其所採用的感知算法方面密切相關,因爲靈犀智駕2.0系統採行泊一體的BEV感知方案,因此可在高速、城區、泊車等全場景運行。
所謂BEV感知方案,全程Bird's Eye View,意思就是視覺爲中心的俯視圖。
一般來說,國內的大部分車企則選擇了包含視覺和雷達的多融合感知方案,但它們的共同點都是需要獲得視覺信號或者其他傳感器的數據來進行綜合運算分析,再通過系統的處理來規劃行車軌跡。但是,在這個過程中,每個獨立傳感器收集到的數據往往受到特定視角的局限,經過各自的分析運算後,融合階段會導致誤差疊加,無法拼湊出道路實際情況的准確全貌,給車輛的決策規劃帶來困難。
而BEV自動駕駛感知利用深度學習網絡融合採集多傳感器數據,將汽車周圍的場景轉換爲俯視圖,實時重建周圍的靜態道路元素和道路拓撲結構,實高精度的全向感知能力。好比是一個從高處統觀全局的“上帝視角”,車上多個傳感器採集的數據,會輸入到一個統一模型進行整體分析推理生成鳥瞰圖,能有效地避免誤差疊加。
另外,靈犀智駕2.0系統還採用了OSP(Open Space Planning)決策規劃技術,基於輕決策、防御性和預期風險規劃的研發思想,讓智能駕駛更擬人。通過對地圖和結構化場景感知的“弱依賴”,以“輕決策”提升場景泛化能力,實現全國各地都能开。並在決策規劃過程中,考慮感知的不確定性和駕駛決策的可能性,管控好可預期的風險,實現真正意義上的防御性駕駛。同時將“駕駛人格”量化,滿足不同駕駛員習慣,在保證安全的前提下提升通勤效率。



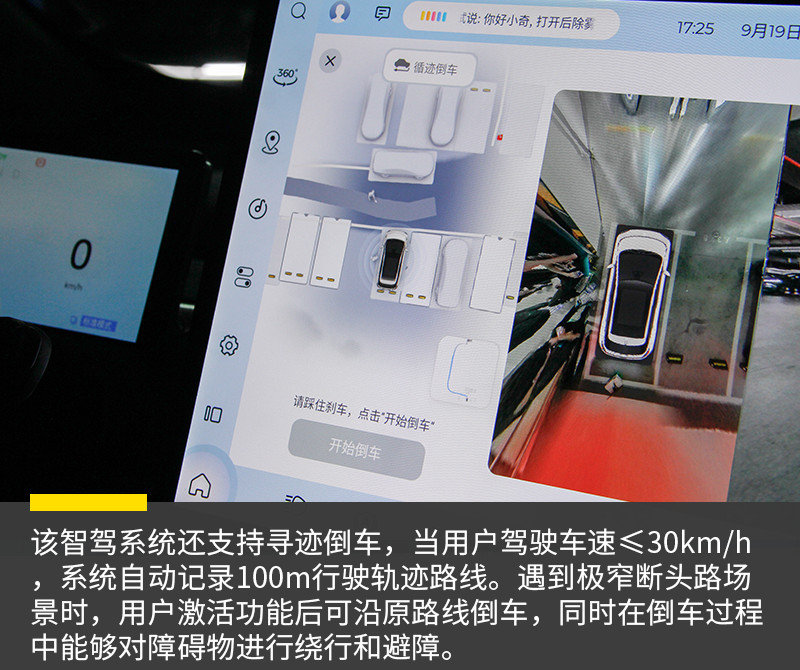
除了高速領航功能外,靈犀智駕2.0還具備記憶泊車和尋跡倒車功能。
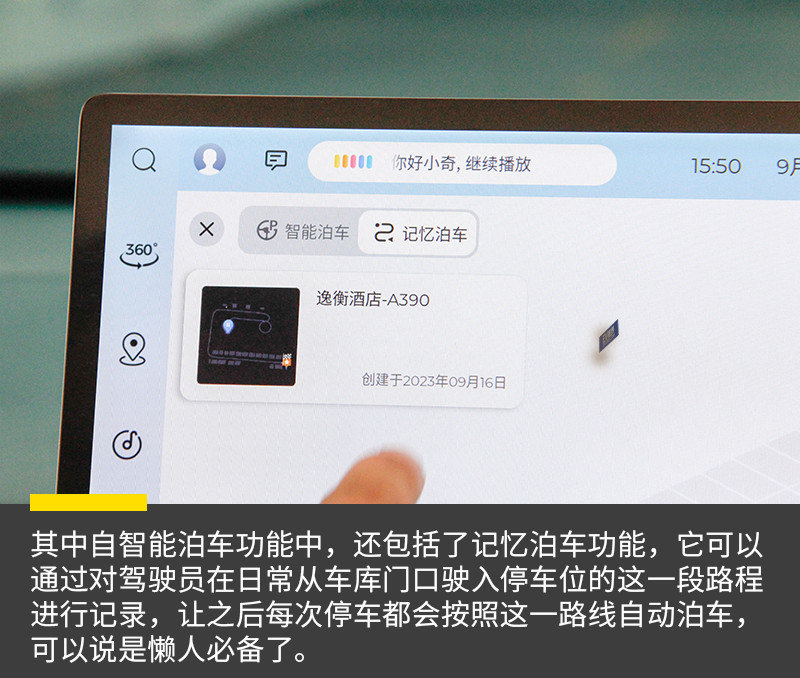
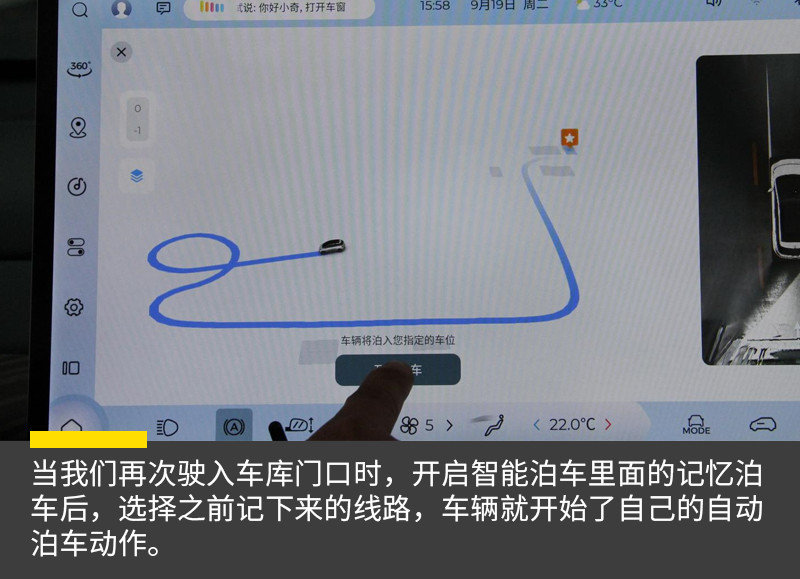
記憶泊車,估計對於那些熟悉智能汽車的用戶來說並不會陌生。它主要記住用戶通往地庫或者露天停車場時所選擇的路线,之後用戶再次停車,只需啓動該功能就能夠自主完成整個步驟,爲車主省心省力。
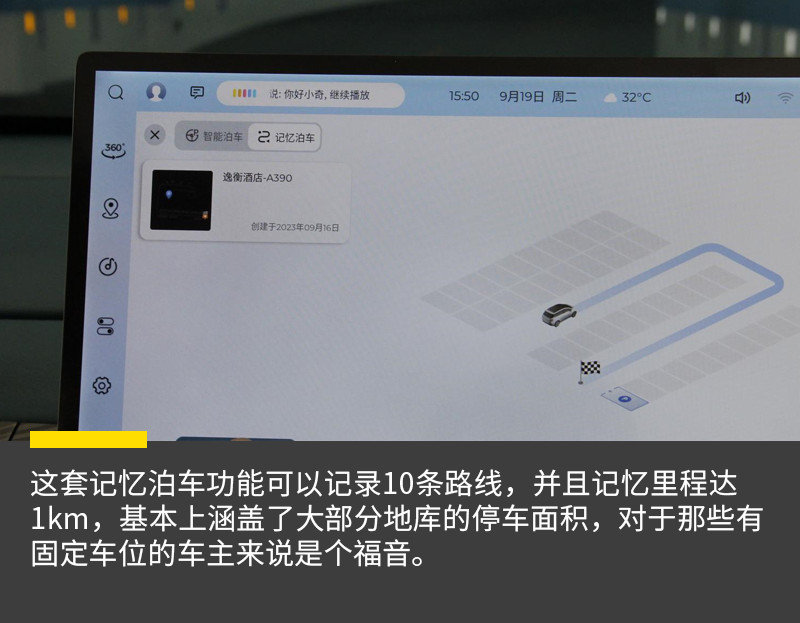
靈犀智駕2.0的記憶泊車功能可實現全場景記憶泊車,支持室內、室外及跨層場景的路线記憶。擁有無感定位智能推薦功能,支持在記憶路线任意位置啓動;記憶路线長且路徑多,最長可支持記憶1km的停車路徑,可記憶多達10條泊車路线;還可自主避障、智能繞行、智能優化調整路徑。並且該功能可識別垂直、側方、斜列等常停車位,還能實現空間泊車。並且對於國內特定的地磚/草磚/劃线不清晰和磨損車位泊車場景都有針對性優化。
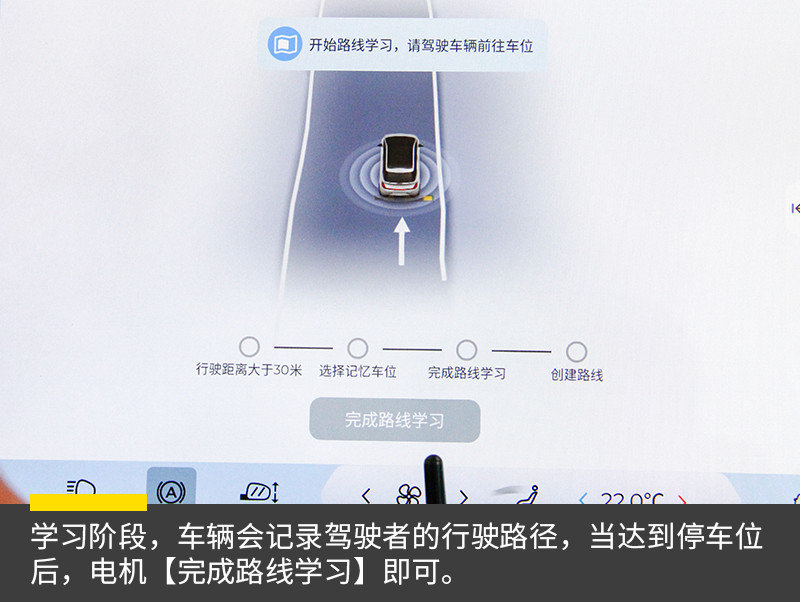
記憶泊車演示(學習)
記憶泊車演示(开啓)
另外,其還可識別減速帶並順利通過;並且對於車位地鎖也能清晰識別並標記爲“不可停”,而最有趣的是,它還可識別限位器確保不會“越位”,正如老司機一般。而在操控上,該功能支車內泊車/車外鑰匙或手機APP泊車,並能覆蓋99%的常見停車場景。
除了以上對於自動輔助駕駛的體驗,我們還針對這款車在動力方面進行一番試駕。
動力方面,寶駿雲朵採用三合一扁线水冷電機,集電機、電機控制器、減速器融爲一體的電驅系統,最大功率100kW,提供兩種續航選擇分別爲超長續航460km和360km。




在NVH方面,根據廠家介紹,寶駿雲朵歷經"材料-零件-系統-整車"全場景4層級NVH控制,從源頭上提升了整車的NVH水准,同時通過全車24個聲學包、毛氈全覆蓋式地毯、吸聲和隔聲多層組合材料、E-booster電子制動系統等方式,將整車的NVH再次提升了一個檔次。

寫在最後
通過體驗,對於寶駿雲朵在智駕方面的表現我還是比較肯定的,因爲它對於同級別、同價位的車型來說,絕對屬於尖子生般的存在。特別是在屬於“高端玩家”的純視覺智駕方案方面,其不僅在技術上搶到頭籌,並且將地圖領航這一高端功能引入了15萬以下車型之中,而這也與五菱所打出的口號相向而行。那么,對於這款適用於家庭出行且擁有同級別更爲頂流智駕能力的寶駿雲朵您怎么看呢?期待您的答案。
標題:用“雙眼”將“地圖領航”做到平權,寶駿雲朵靈犀版智駕體驗
地址:https://www.utechfun.com/post/267695.html