

本文來源:智車科技
近日,OpenAI宣布推出生成式人工智能模型Sora,外界普遍認爲,這是AI視頻生成的全新裏程碑時刻。僅需只言片語,Sora就可以給你輸出一段最長60秒的視頻,並且能夠全程保持高度的流暢性與穩定性,實現了對Runway、Stable Video、Pika等生成式AI的超越。值得一提的是,Sora還能夠根據靜態圖像擴展成一段視頻或補充缺失的動態幀。
真賦能也好,蹭熱度也罷,一時間整個行業都在圍着AI轉,也在开始認真思考,更先進的AI技術能夠爲他們帶來什么不一樣的應用場景。站在汽車行業的角度,Sora等更超前的大模型是否能助力智能駕駛的真正落地,其中最先從大模型獲益的當屬感知模塊,本文想從大模型助力感知的表達來一探Sora將帶給智駕領域的革命。

感知表示的多樣性
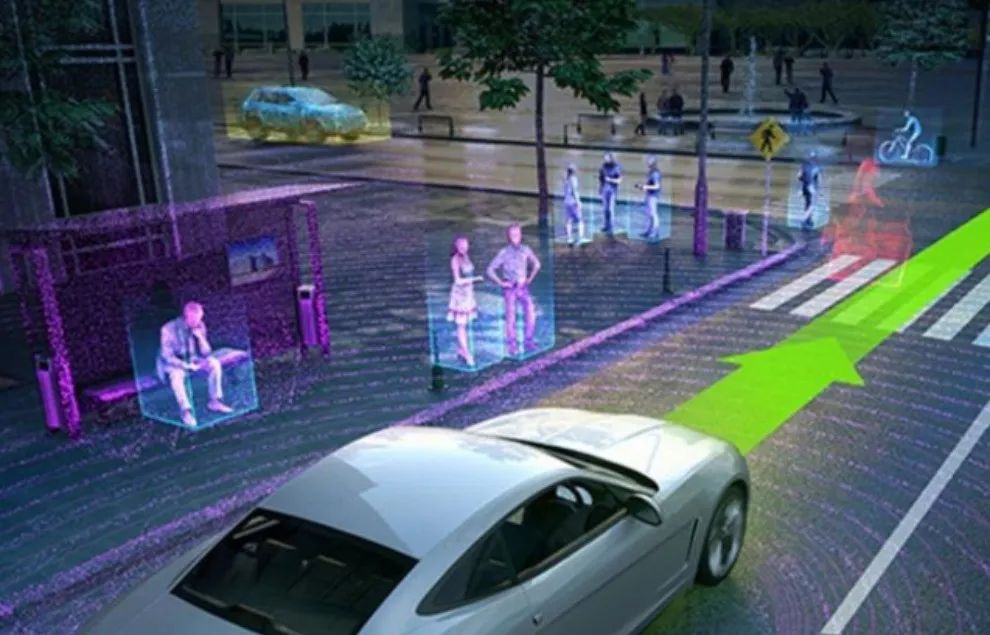
感知的表達形式是多種多樣的,在現如今的主流自動駕駛框架中,感知物體的表達形式往往分爲以下幾類:
一是通過bounding box的形式來表示。對於常規物體例如交通流中的車輛,行人,自行車等等,Box的表達已經完全可以勝任,且具備高度抽象和簡潔的優勢。但當我們談論到高級別自動駕駛,我們需要關心的是一切不可碰撞物體,其包含了柵欄、非剛體車、異形/未知類別物體、遺落的木頭塊等,Box並不能總適應這樣的物體,尤其在狹窄路段,box的表示往往會過於保守,導致車輛行爲笨拙。
那么如果用polygon的形式是否就可以呢?相較於box,polygon的表達可以幾乎不丟信息地完成障礙物的形狀表達,同時兼備了抽象和簡潔的性質,但與此同時由於其是在連續空間中的表達,對算力的要求非常高,因此較難以落地。
那么是否可以結合一下離散空間與連續空間的表達形式,對兩方都有一定的妥協呢?Tesla的Occupancy Network便給出了一個很好的結合樣例。基於Grid的表示,能從本質上解決目前感知完備性的問題,從激進的角度,甚至可能代替掉Box的表示。而這一形式的推出,也立即成爲了各家自動駕駛企業的效仿對象,不僅在論文刷榜中取得了優異的成績,也在實車落地上取得了迄今爲止最好的表現。但與此同時我們不禁想問,Occupancy Grid已然是最好的感知表達形式了嗎?難道這個討論了十幾年的問題已經有了最終答案,沒有再改進的空間了嗎?
下遊規控的易用性
我們知道,感知想要完備地從各個傳感器的輸入中,提取出想要的物體,並將其進行語義上的融合是一項非常困難的任務,也在困擾着諸多的業界從業人員。其中非常大的一項挑战便是,在信息的處理傳遞過程中,肯定會存在信息的損失。而這種信息的損失最終也會造成下遊決策規控的出錯。而要想解決這一問題,最好的方式便是以規控的目標作爲代價函數,來優化感知的輸出形式。
一直以來,模塊化處理復雜問題的最大劣勢便是信息的丟失問題,而端到端想要解決的便是徹底消除此間丟失的信息。通常,模塊化系統被稱爲中間範式,並被構建爲離散組件的管道,連接傳感器輸入和運動輸出。模塊化系統的核心過程包括感知、定位、建圖、規劃和車輛控制。模塊化流水线首先將原始傳感器數據輸入到感知模塊,用於障礙物檢測,並通過定位模塊進行定位。隨後進行規劃和預測,以確定車輛的最佳和安全行程。最後控制器生成安全操縱的命令。

另一方面,直接感知或端到端驅動直接從傳感器輸入輸出自車運動。它優化了駕駛管道,繞過了與感知和規劃相關的子任務,允許像人類一樣不斷學習感知和行動。端到端駕駛基於傳感器輸入輸出自車運動,這種運動可以是各種形式的。然而,最突出的是相機、LiDAR、導航命令、和車輛動力學,如速度。這種感知信息被用作主幹模型的輸入,主幹模型負責生成控制信號。自車運動可以包含不同類型的運動,如加速、轉彎、轉向和蹬踏。此外,許多模型還輸出附加信息,例如安全機動的成本圖、可解釋的輸出或其他輔助輸出。但整個系統過於龐大,並缺少一個整體的優化目標,使得端到端無法真正落地產生效果。隨着UniAD的提出,以planning的目標作爲整個系統的優化導向,並分模塊對各個子系統進行打分,給從業者們一個新的思考方向。
Sora助力端到端落地
OpenAI表示,Sora在訓練當中表現出了與其它模型不同的湧現能力,通過湧現學習到了物品的時間與空間的相關性,以及與周圍世界互動的能力等。簡單來說,Sora不單止是擁有感知世界運行法則的能力,它還可以判斷不同事物之間的關系,擁有發散思考的技能。智能汽車當中的智能駕駛能力也是訓練AI模型得出的結果。當前汽車智能駕駛分爲感知、定位、決策、規劃、控制幾個模塊,每個部分緊密配合,最終實現精確的智能駕駛。智能駕駛的不同模塊,目前都需要單獨訓練,訓練量龐大,研發人員要通過不斷地“喂數據”優化迭代,所帶來的沉沒成本自然巨大。
人在駕駛汽車的時候,很多判斷都是基於對這個世界的理解,比如對方的速度、會否發生碰撞、碰撞的嚴重性如何。這就是當前智能駕駛與真人司機之間的區別。
但Sora對世界的感知和交互能力,並不是單純的數據堆疊就能實現的。想要提高自動駕駛的研發和運行效率,人爲優化迭代是必須,更重要的還是要讓AI具備自主發散,縮短迭代周期,將交互能力賦能到現有的智駕模型當中,更接近人類的駕駛體驗或許就此誕生。
但與此同時,端到端的落地也伴隨着相當多的挑战。首先是神經網絡的可解釋性問題。可以想象,如果自動駕駛的車輛調試時出現安全問題,工程師們在排查問題時可不能說一句:“需要多採集點數據,問題便可能得到解決”就能夠應付的。事關性命安全問題,需要的是像汽車行業幾百年累積的經驗一般,要保障每輛車的安全性,這裏容不得概率與可能性作祟。
其次便是用戶的接受程度。在自動駕駛的過程中,用戶肯定希望能看到這輛車的行爲,好對行進狀況有個心理預期。而傳統的分模塊方案,感知的表達可以通過各種各樣的形式可視化出來,但端到端卻不具備這樣的能力,其更像是一個黑盒。在這種情況下,銷售如何向用戶保證這套系統的安全都是沒有說服力的,用戶的接受程度將會成爲落地上真正困難的一環。
在過去的幾年裏,由於與傳統的模塊化自動駕駛相比,端到端自動駕駛的設計簡單,人們對它產生了濃厚的興趣。在端到端駕駛研究呈指數級增長的推動下,越來越多的感知表達形式被提出,人們也希望在端到端的框架下,實現一種更加完備的感知表示方案,在保障規控接收到足夠信息的同時,也減輕感知對於算力的依賴負擔。而Sora的爆火相信也會給智駕行業指明一條全新的道路。
原文標題 : 爆火的Sora將給自動駕駛帶來怎樣的改變?
標題:爆火的Sora將給自動駕駛帶來怎樣的改變?
地址:https://www.utechfun.com/post/338964.html