
2023年新能源車流行800V高壓系統上車,拼的是充電時間和能耗表現;2024年新能源車流行激光雷達上車、流行高速NOA和城市NOA,拼的是誰的算法更強,高階智能駕駛开通率更高。以至於最後可能拼的是誰的神經網絡更強、學習能力更快,誰才有可能做出更好的NOA效果。
至少我們熟知的那些新勢力品牌們,都已經在智能駕駛領域中有了一定的突破,但目前市面上對於智能駕駛的應用方案中來看,有激光雷達融合感知方案,也有純視覺感知方案。這兩大方案流派構成了目前高階智能駕駛的全部。而且高階智能駕駛功能,都包含了城市/高速NOA功能。
那么,沒有激光雷達的城市NOA方案,到底還適不適合2024年了?
激光雷達,會幫你很多
如果2022年是激光雷達量產的元年,2023年是裝車量开始起勢的一年,那么2024年就可以說是城市NOA(城市導航輔助駕駛功能)落地的元年。目前,行業內像AITO問界(華爲)、理想、小鵬等車企都逐步开放了目標城市,城市數量也是一個比一個多,而城市NOA的落地也帶來了一個衍生問題。
激光雷達,對於城市NOA到底重要不重要。
聊這個問題之前,需要梳理清晰城市NOA所對應的功能都包含了什么。早些年,ACC自適應巡航+車道保持等配置的加入,一定程度上讓駕駛員能輕松一些,這也是我們當年能接觸到的最高級別的輔助駕駛功能了。
反觀現在,城市NOA將實現根據導航指引,從A點到B點的輔助駕駛功能,例如跟車行駛、剎停、並线;路口的左右轉彎、根據信號燈指示停車/行進;在停車場自動泊車、泊出等等。要實現這些功能,需要有算力足夠高的芯片支撐之外,還需要一系列強大且精准的感知硬件來完善才可以實現。
上述,是爲了讓各位明白,城市NOA裏感知硬件面對的情況非常復雜且多變,相比於高速NOA的工作條件,城市NOA面對的難度是成倍數增長的。
從現階段落地的重感知方案看,主要有兩類,第一種多採用的是激光雷達,但2023年的下半年开始,第二種的純視覺方案城市NOA方案也逐漸在增加,例如百度Apollo City Driving Max、大疆車載成行平台-9V、特斯拉FSD以及極越等。
聊一聊底層邏輯。

視覺感知,無外乎用攝像頭做主感知硬件,它提供的信息將會有很大的決策比重;其余的超聲波、毫米波雷達,存在感不大,只是在這套系統裏輔助一樣的存在;另一個核心,是背後的大模型以及學習能力;用攝像頭收集來的信息,做3D重建,然後判定物體。
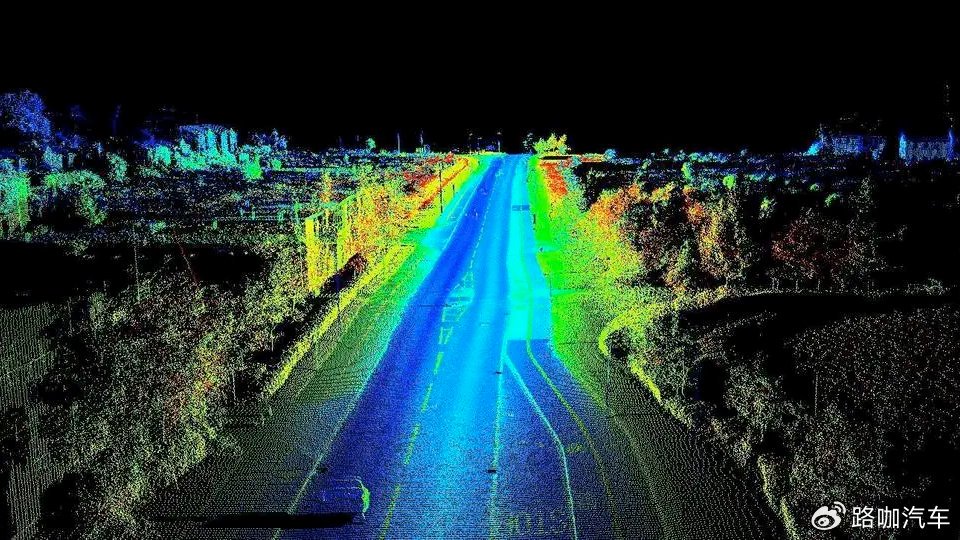
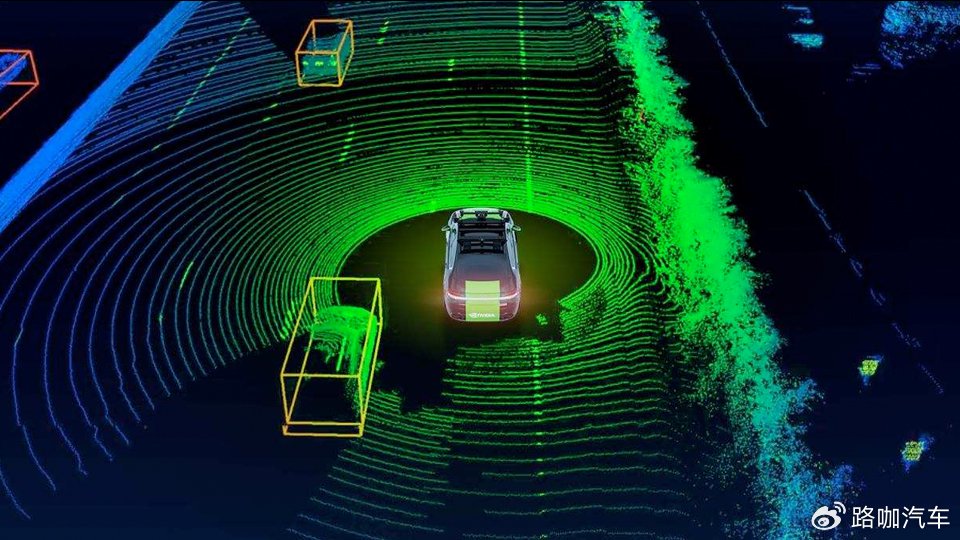
激光雷達,則是主要依靠激光雷達的點雲來完成對物體的探測,而點雲生成的速度可以高達數十萬點/秒,精確程度是攝像頭轉3D建模很難達到的效果;一顆激光雷達做前向不夠用的話,還可以側向2顆、後向1顆,滿足整車360°的激光雷達探測覆蓋;然後現在激光雷達也有大模型的傾向,逐漸拋棄高精地圖的模式,看似和純視覺方案有些類似,但激光雷達能提供的數據精度,遠遠由於純視覺方案。
不講大場景工況下的使用,例如在行泊一體的准L3工況下,自動泊車功能對於周圍物體的數據准確性非常高,加入側向激光雷達之後,這個探測距離可以做到0.05米。如果依靠視覺方案的話,側向感知,只能依靠毫米波、超聲波雷達來提供支持。
視覺方案,是不是走不通了?

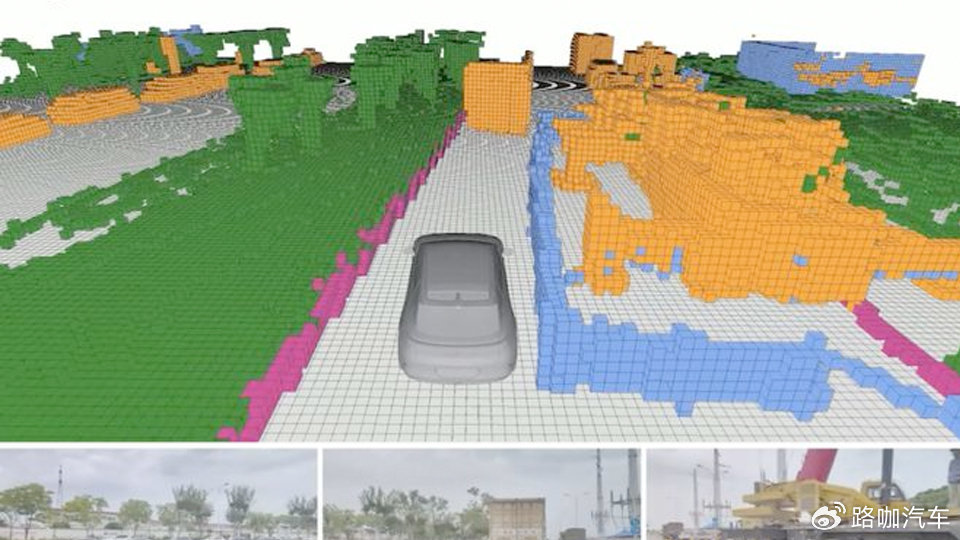
視覺感知這套路线,優點是便宜,但缺點更凸顯,例如對於深度信息的檢測不足,還有對三維空間的構建都是短板,並且是長期存在的問題。但現在衍生出了大模型來彌補這兩個短板,極越和百度的合作,是國內第一個用上Occupancy Network技術的。
而這項技術,特斯拉也在用。
大致意思就理解成,學習函數空間並且用三維重建方法來展現3D空間的方式,用視覺素材+算法,來實現類似於激光點雲的效果。這套視覺感知方案的功能,存在不確定性,例如一輛特斯拉Model Y(配置|詢價)在美國底特律西南部一個十字路口撞上了一輛白色半掛卡車。據事故報告稱,事發當時該車开啓了Autopilot模式,不過系統AI算法將停在路上的白色貨車車廂識別爲了天空。
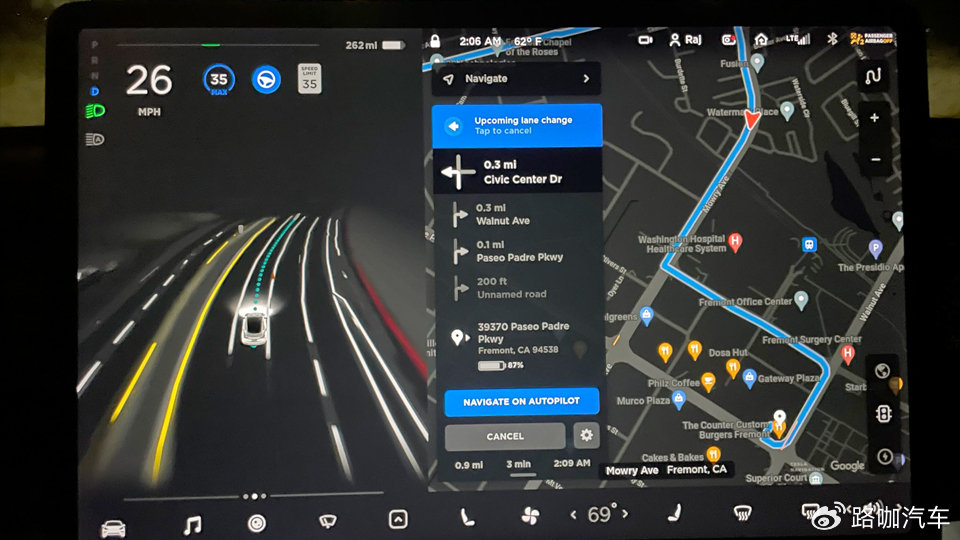
於是,導致車輛沒有進行任何剎車行爲就直接撞了上去。這就是視覺方案的弊端,相比於視覺方案,激光雷達則是類似於“觸覺”的感知,可以探測到百米遠的物體,屬於什么材質,而不會出現視覺判定可以把白色車輛識別成天空的問題。
這么說吧,就連現在的特斯拉也沒能拿出特別成熟的純視覺方案,現階段更多的是讓純視覺方案的算法變得更好。間接的表明了這條路不好走,很難,不是爲了低成本的話走這條路真的不合適。但在特斯拉更新了FSD V12版本,搬出了神經網絡學習能力之後,緩解了純視覺方案的某些不足,讓其不在依賴單純的數據,而是具備了強大的學習能力,類似的場景下可以根據學習到的人類駕駛員的處理方式來進行指令操作,在美國本土市場的實測來看相對順暢,偶爾需要人類來接管,對於目前的L2級別智能輔助駕駛來說,能力足夠,但對於L3級別的輔助駕駛場景暫時還不能下定論。
能力層面,行車這一塊基本實現的差不多了,例如高速NOA功能實現的效果能類似於激光雷達,只要做的足夠保守,也能好用。但是,城市NOA工況下,仍然在啃一些大場景的難點,例如像路邊停靠的車輛這種場景,視覺方案無法識別這台車究竟是動態還是動態,如果這台車突然起步,視覺判定可能依舊是靜態的,敏感度較低帶來的弊端。

以目前純視覺感知的方案來判斷,兩個發展導向。
第一種,它將以性價比優勢打通20萬元以下車型的智能駕駛方案,但不適用於城市NOA功能,更多是支持高速NOA功能的實現,加快低等級智能駕駛的落地。第二種,滿足城市NOA和高速NOA兩種工況的使用,但算法策略會傾向於更加保守的方案,整體使用的舒適度不如有激光雷達的方案。
業內部分企業的選擇更傾向於第一種方案。
激光雷達在2024年將成爲大部分品牌剛需配置,尤其是使用到華爲提供的ADS高階輔助駕駛的品牌。還有像蔚來、理想這些激光雷達堅定的企業,小鵬汽車雖然在激光雷達的使用上依舊偏向保守(有純視覺的想法,但在猶豫),但目前的方案仍然基於激光雷達來做的。

不是否認視覺方案的能量,但我們得正視它性能上的局限性,做城市NOA可以,但特斯拉也在不斷提升純視覺感知下城市NOA的功能,來讓它更好用。之後還要考量國內不同城市的不同道路習慣,對於更依靠算法的視覺方案來說,將會是極爲龐大且繁瑣的“學習壓力”。
反問幾個問題:
1.當激光雷達被各大廠商打下來的時候,純視覺還有必要么?
2.激光雷達便宜之後,特斯拉轉向了,現有純視覺擁躉跟不跟?
3.視覺感知局限性,沒有強大神經網絡的話,是不是不如激光雷達好用?

另外,補充一句特斯拉FSD今年落地中國市場的可能性非常大,2023年已經开始陸續測試。最終FSD的使用效果,可能會最終決定純視覺、激光雷達的城市NOA方案走向。特斯拉FSD V12來國內面臨第一個問題,在國內場景下做適配,這不是難題,短期內很好實現。適配之後,能不能用在美國市場那套方案打通國內的城市NOA做出同樣的效果,是一個問題;其次,特斯拉FSD的城市NOA开城率,能不能追平現在的激光雷達方案的新勢力們,又是一個問題。
今年,特斯拉領頭的純視覺方案,和一衆新勢力們選擇的激光雷達方案,在高階智能駕駛面向L3之前,市場或許會給出一個明確的選擇。
標題:別怕FSD,華爲們證明了,沒有激光雷達做NOA並不耍流氓?
地址:https://www.utechfun.com/post/332675.html